Tag: Integrity
-
Research Highlight
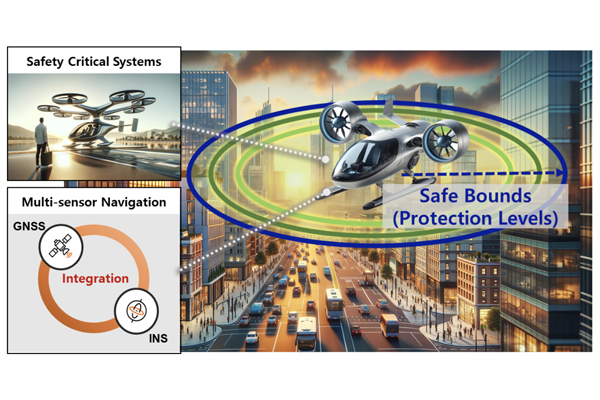
Navigation Safety of GNSS/IMU Integrated System for Autonomous Vehicles
Prof. Lee's group has developed an algorithm to ensure navigation integrity against Inertial Measurement Unit (IMU) sensor faults for safety-critical GNSS/IMU integrated navigation applications....read more
KAIST Institutes for Interdisciplinary and Integrative Research
Copyright © 2015 KAIST MATRIX. All rights reserved.
291 Daehak-ro Yuseong-gu Daejeon, 34141, Republic of Korea
Partnered with KAIST Breakthroughs and KAIST Compass
291 Daehak-ro Yuseong-gu Daejeon, 34141, Republic of Korea
Partnered with KAIST Breakthroughs and KAIST Compass