



The Interactive Robotic Systems (IRiS) Lab is dedicated to improving human lives by advancing robotic technologies. Our mission is to develop principles, technologies, and human resources in the area of interactive robotic systems, with a focus on field robotics, including disaster response, construction, space, nuclear plants, and more. We are particularly interested in the following:
1. Haptics and Teleoperation
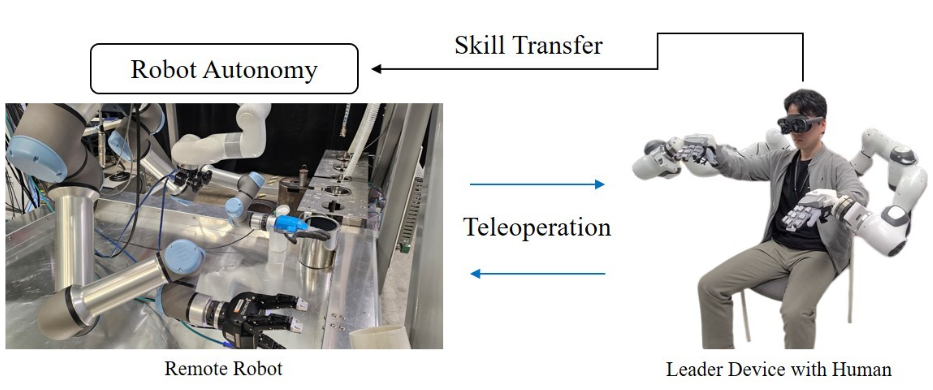
Over the past several decades, the utilization of telerobotic systems has steadily increased across a range of applications, including space and underwater exploration, mining, handling of nuclear and hazardous materials, surgery, and even entertainment. Telerobotics technology enables the transmission of human-like manipulation capabilities to environments that are either inaccessible or hazardous for humans, leveraging the combination of human cognitive abilities with the precision, repeatability, and strength of robots. Notably, haptics plays a crucial role in establishing a kinesthetic link between the human operator and the telerobot. At IRiS Lab, we are focused on developing control strategies and master devices aimed at achieving stable and transparent telerobotic systems across diverse application domains. Recently, we have been developing a framework to capture human manipulation skills through remote demonstrations and to achieve autonomy by transferring these skills to robotic systems.
2. Soft Actuators and Wearable Devices
There recently has been growing interest in the development of exoskeletons. A major challenge in this field is achieving a balance between softness and sufficient structural support to assist human movement. Additionally, there is a need for wearable exoskeletons that are lightweight, powerful, and agile. Traditional exoskeleton designs tend to be rigid, treating human joints as simple single degree-of-freedom revolute joints, which restricts the wearer’s natural range of motion. In this light, there is a critical demand for actuators that are soft yet capable of delivering high actuation forces. At IRiS Lab, we are focused on developing the Twisted String Actuator (TSA), a soft, muscle-mimicking actuator, and designing soft exosuits around it. TSA’s high transmission efficiency and superior power-to-weight ratio enable the design of soft, yet powerful, wearable exoskeletons.

3. Soft Growing Robots
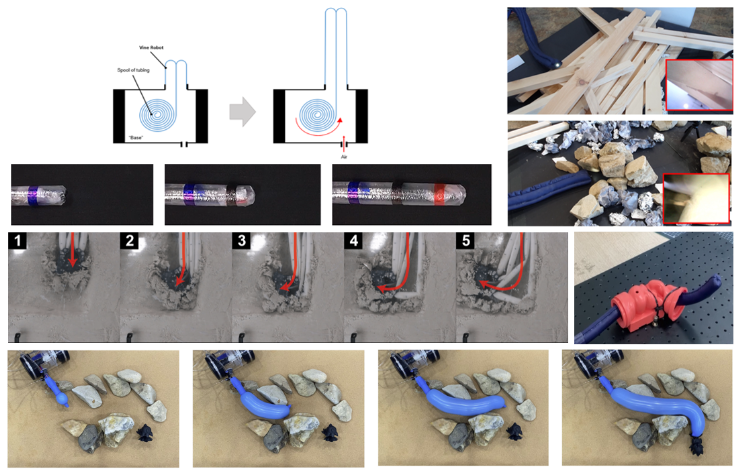
Soft-growing robots, commonly referred to as vine robots, are inspired by the growth mechanisms observed in plants. These robots possess the unique ability to elongate and adapt their shape, allowing them to navigate complex and confined environments such as collapsed structures or debris-filled areas—scenarios where traditional rigid robots encounter substantial limitations. At the IRiS Lab, researchers are striving to optimize the design and performance of these robots to meet the specific challenges posed by diverse and demanding environments by enhancing their growth and steering capabilities. The lab is also working on integrating various sensors, such as cameras located at the tip of the robot, to further extend its functionality. Additionally, the IRiS Lab is broadening the application domains of vine robots to include tasks such as directional drilling, medical endoscopy, and rescue missions.
4. Autonomous Mobility
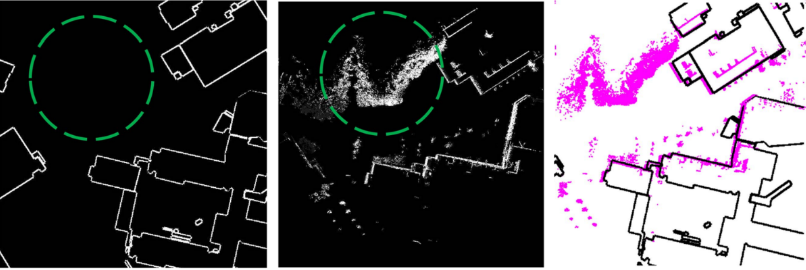
Research on autonomous mobility is focused on improving vehicle safety and adaptability within the context of smart cities. At the IRiS Lab, efforts are underway to develop localization methods that leverage freely available maps, such as OpenStreetMap, rather than relying on HD maps, enabling autonomous vehicles to operate without pre-existing high-definition data. In parallel, the lab is advancing SLAM (Simultaneous Localization and Mapping) and environmental recognition technologies, facilitating precise navigation and spatial awareness across diverse environments. Additionally, the IRiS Lab is addressing challenges that arise when autonomous vehicles experience malfunctions or become disabled. To enhance safety and reliability, the lab is developing teleoperated driving systems, allowing for remote manual control when the vehicle’s autonomous systems fail, thereby ensuring continued operation and increased resilience in autonomous transportation.

More details can be found on the homepage (http://iris.kaist.ac.kr/) and YouTube (https://www.youtube.com/watch?v=w85Tr-eJKzA).

Jee-Hwan Ryu is a professor in the Department of Civil and Environmental Engineering at the Korea Advanced Institute of Science and Technology (KAIST), where he is also affiliated with the KAIST Robotics Program, KI Robotics, the HRI Research Center, and G-school. He earned his M.S. and Ph.D. degrees in Mechanical Engineering from KAIST in 1997 and 2002, respectively, and his B.S. degree in Mechanical Engineering from INHA University in 1995. In 2016, he founded BioRob, a soft actuator company, and has been its CTO since 2019. He was a visiting professor at Stanford’s AI Lab from 2016 to 2017 and held post-doctoral positions at DLR and the University of Washington from 2002 to 2003. His research interests include haptics, telerobotics, soft actuators, and autonomous vehicles. He is currently serving as a Senior Editor of IEEE Robotics and Automation Letters, Coordinator of the IEEE Distinguished Lecturers Program, and Vice President of the Korea Haptic Society. He has received several awards, including the 2019 Korea Robot Society Robotics Innovation Award, the 2021 IEEE Robotics and Automation Magazine Best Paper Award, the 2021 KAIST Top 2 Tech Award, and the 2023 KAIST
