



Recently, the development of intelligent robots based on artificial intelligence has drawn increasing attention worldwide. Google has developed an artificial intelligence-based autonomous vehicle and the AlphaGo Go game program, and Deep Learning has made breakthroughs in video and speech recognition. Meanwhile, Hubo, which was developed by KAIST in 2015, won the DARPA Robotics Challenge and won the first prize in robotics technology in Korea. Based on research on various robots at the university, we can combine intelligent technologies to develop a robot system that can make intelligent judgments even in complex environments and will develop core technologies required for it. Our research team is comprised of eight core professors, as follows, and develops intelligent robots to integrate them into each field. The main focus includes robot intelligence for humanoids, social robots, and mobile robots.
KI Robotics (KI-R) group consists of eight research labs led by Prof. Junho Oh, Prof. Jong-Hwan Kim, Prof. Dong-Soo Kwon, Prof. Hyunchul Shim, Prof. Jinwhan Kim, Prof. Hyun Myung, Prof. Han-Lim Choi, and Prof. Ayoung Kim. Each group pursues robot intelligence in various aspects.

RTOS for Humanoid Robots
Hubolab (Prof. Junho Oh)
 Based on know-how from researching various machine system controls for about 30 years, Prof. Oh started the Humanoid Robot Laboratory (Hubolab) in 2000 and has been developing humanoid robots representing Korea. In order to improve the performance of robot behavior and impart the capability to perform various tasks, the team is designing high power electric motors, compact hydraulic actuating systems, and high performance motor drivers and sensors. The lab is developing new robot platforms such as bipedal robots as well as quadruped or mobile robots. Study of algorithms to perform certain tasks through whole body control is also on-going.
Based on know-how from researching various machine system controls for about 30 years, Prof. Oh started the Humanoid Robot Laboratory (Hubolab) in 2000 and has been developing humanoid robots representing Korea. In order to improve the performance of robot behavior and impart the capability to perform various tasks, the team is designing high power electric motors, compact hydraulic actuating systems, and high performance motor drivers and sensors. The lab is developing new robot platforms such as bipedal robots as well as quadruped or mobile robots. Study of algorithms to perform certain tasks through whole body control is also on-going.
AI for Cooperative Robots
RIT Lab (Prof. Jong-Hwan Kim)
 The Robot Intelligence Technology (RIT) Lab focuses on intelligent robotics including Multi-agent Systems, Mobile Robots (Omni-direction) and Humanoid Robots in Ubiquitous Environments, and Genetic Robots (Genome, Adaptation (Learning and Evolution), Growth and Personality). Computation Intelligence and Cognitive Architecture considering External Context and Internal Willingness, and their application to Humanoid Robots are also key research issues.
The Robot Intelligence Technology (RIT) Lab focuses on intelligent robotics including Multi-agent Systems, Mobile Robots (Omni-direction) and Humanoid Robots in Ubiquitous Environments, and Genetic Robots (Genome, Adaptation (Learning and Evolution), Growth and Personality). Computation Intelligence and Cognitive Architecture considering External Context and Internal Willingness, and their application to Humanoid Robots are also key research issues.
TLC Lab (Prof. Dong-Soo Kwon)
 The Telerobotics and Control (TLC) Lab consists of three teams including the Medical Robotics team, Human Robot Interaction team, and Haptic Team. The Human Robot Interaction team, located in the KI building, has researched various fields. There has been research on imitating human gestures in robots, facial expression recognition, fall detection, and 3D surface descriptors.
The Telerobotics and Control (TLC) Lab consists of three teams including the Medical Robotics team, Human Robot Interaction team, and Haptic Team. The Human Robot Interaction team, located in the KI building, has researched various fields. There has been research on imitating human gestures in robots, facial expression recognition, fall detection, and 3D surface descriptors.
LiCS Lab (Prof. Han-Lim Choi)
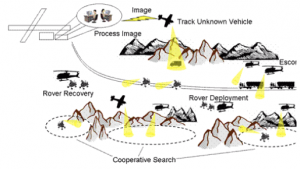 The Laboratory for information and Control Systems studies systems in which information flows and decisions are made. Specifically, researchers try to understand networked systems of autonomous agents (e.g., teams of unmanned aerial vehicles) and the information gathering process for complex environments. Estimation, control, robotics, and optimization theories are the key technical tools this group utilizes to understand these systems. The application systems the group is working on include: unmanned aerial vehicles, autonomous ground robots, wireless sensor networks, multi-function radars, air traffic management systems, and environmental sensing systems.
The Laboratory for information and Control Systems studies systems in which information flows and decisions are made. Specifically, researchers try to understand networked systems of autonomous agents (e.g., teams of unmanned aerial vehicles) and the information gathering process for complex environments. Estimation, control, robotics, and optimization theories are the key technical tools this group utilizes to understand these systems. The application systems the group is working on include: unmanned aerial vehicles, autonomous ground robots, wireless sensor networks, multi-function radars, air traffic management systems, and environmental sensing systems.
Mobile Intelligence
USRG (Prof. Hyunchul Shim)
 The Unmanned System Research Group (USRG) aims to deliver breakthrough technologies for unmanned systems such as drones and self-driving cars. By combining principles in electrical engineering, mechanical engineering, and aerospace, the group endeavors to develop solutions that can work in the real-world environment. Work is based on our lab’s in-house technologies, such as flight control systems, autonomous driving solutions, and universal methods for highly autonomous vehicles by humanoids robots. Our lab is playing a crucial role in integrating UAVs into the civil airspace field by working together with MOLIT. Our lab is also working hard to build AI-enabled autonomous driving algorithms and to validate them using our MOLIT-certified testbed and a rail-free tram for our own students at KAIST.
The Unmanned System Research Group (USRG) aims to deliver breakthrough technologies for unmanned systems such as drones and self-driving cars. By combining principles in electrical engineering, mechanical engineering, and aerospace, the group endeavors to develop solutions that can work in the real-world environment. Work is based on our lab’s in-house technologies, such as flight control systems, autonomous driving solutions, and universal methods for highly autonomous vehicles by humanoids robots. Our lab is playing a crucial role in integrating UAVs into the civil airspace field by working together with MOLIT. Our lab is also working hard to build AI-enabled autonomous driving algorithms and to validate them using our MOLIT-certified testbed and a rail-free tram for our own students at KAIST.
Morin Lab (Prof. Jinwhan Kim)
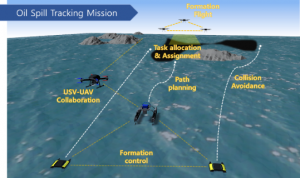 The Mobile Robotics & Intelligence Laboratory (MORIN Lab) is a research group focused on intelligent control and autonomy of vehicles and mobile robotic systems. The group is conducting research on dynamics, guidance, control, and estimation across the full range of manned and unmanned vehicle applications. Group is also working on developing innovative algorithms and techniques that are applicable to all types of vehicles and mobile robotic systems.
The Mobile Robotics & Intelligence Laboratory (MORIN Lab) is a research group focused on intelligent control and autonomy of vehicles and mobile robotic systems. The group is conducting research on dynamics, guidance, control, and estimation across the full range of manned and unmanned vehicle applications. Group is also working on developing innovative algorithms and techniques that are applicable to all types of vehicles and mobile robotic systems.
URL (Prof. Hyun Myung)
 The Urban Robotics Lab (URL) focuses on the development of fusion technologies between robotics and urban engineering. The research fields include automation, robotics, instrumentation, monitoring, inspection, control, and rehabilitation for civil infrastructure. Group also deals with construction informatics supporting sensing, analysis and design activities needed to construct and operate smart and sustainable built environments.
The Urban Robotics Lab (URL) focuses on the development of fusion technologies between robotics and urban engineering. The research fields include automation, robotics, instrumentation, monitoring, inspection, control, and rehabilitation for civil infrastructure. Group also deals with construction informatics supporting sensing, analysis and design activities needed to construct and operate smart and sustainable built environments.
IRAP Lab (Prof. Ayoung Kim)
 The Intelligent Robotic Autonomy and Perception (IRAP) Lab focuses on robotics problems in civil and environmental engineering applications. Targeting many difficult to access or dangerous sites in the environment, they solve problems of robot autonomy by using perceptual sensor data. Main research interests and detailed robotics topics include perception-based environment mapping, intelligent sensor fusion, decision making and control of robotic agents, robotic operation, and navigation in GPS-denied enthronements.
The Intelligent Robotic Autonomy and Perception (IRAP) Lab focuses on robotics problems in civil and environmental engineering applications. Targeting many difficult to access or dangerous sites in the environment, they solve problems of robot autonomy by using perceptual sensor data. Main research interests and detailed robotics topics include perception-based environment mapping, intelligent sensor fusion, decision making and control of robotic agents, robotic operation, and navigation in GPS-denied enthronements.
