Tag: Navigation
-
Research Highlight
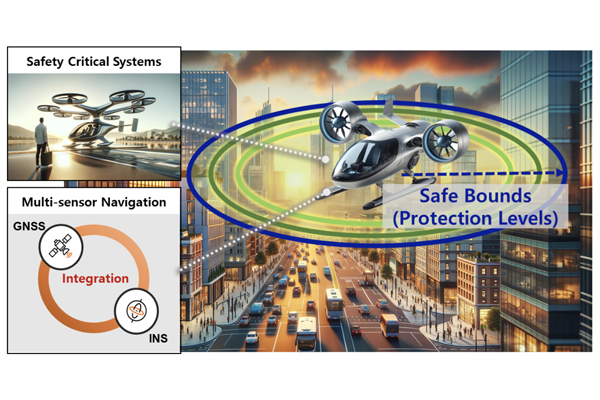
Navigation Safety of GNSS/IMU Integrated System for Autonomous Vehicles
Prof. Lee's group has developed an algorithm to ensure navigation integrity against Inertial Measurement Unit (IMU) sensor faults for safety-critical GNSS/IMU integrated navigation applications....read more
-
Research Highlight
Radar-based Navigation for All-weather Autonomous Driving
Radar is a widely adopted sensor for automotive and military purposes; however, few studies have focused on using radar as the dominant navigational sensor. Unlike Light Detection and Ranging (LiDAR) and cameras, radar is less sensitive to light condition and even robust under heavy rain or dust....read more

KAIST Institutes for Interdisciplinary and Integrative Research
Copyright © 2015 KAIST MATRIX. All rights reserved.
291 Daehak-ro Yuseong-gu Daejeon, 34141, Republic of Korea
Partnered with KAIST Breakthroughs and KAIST Compass
291 Daehak-ro Yuseong-gu Daejeon, 34141, Republic of Korea
Partnered with KAIST Breakthroughs and KAIST Compass