Tag: Prosthetic hand
-
Research Highlight
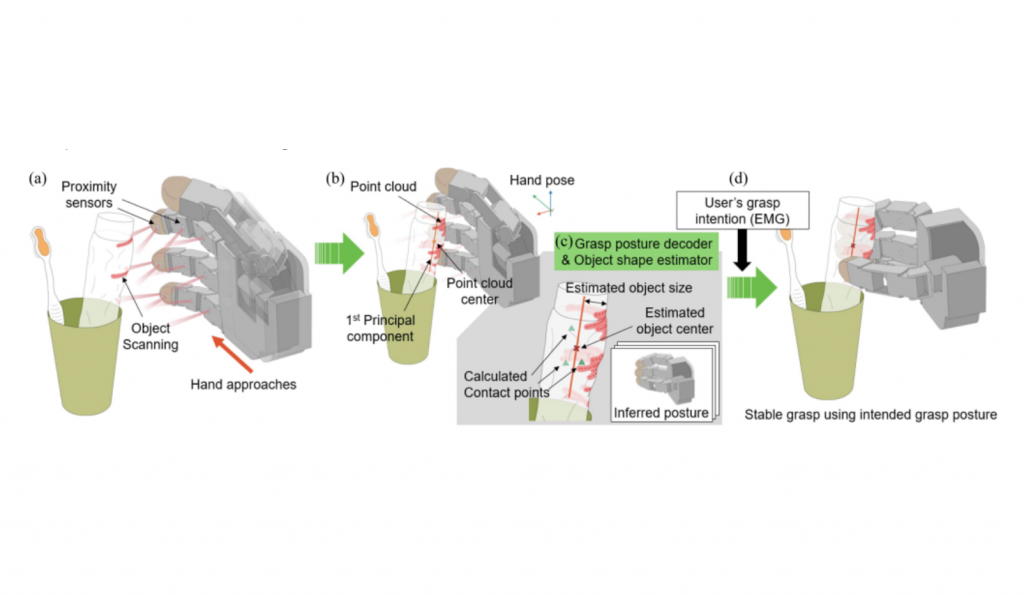
Proximity Perception-Based Grasping Intelligence: Toward the Seamless Control of a Dexterous Prosthetic Hand
A novel perception system, the proximity perception-based grasping intelligence (P2GI) system, has been developed to enhance the dexterity of prosthetic hands, closely mimicking human hand functionality. Utilizing embedded proximity sensors and a real-time decision-making algorithm, the P2GI system accurately maps the point cloud of an object and infers the user’s intended grasp posture, achieving a high accuracy of grasp posture classification and a high rate of task success. This advancement promises significant improvements in prosthetic hand control, potentially broadening the application of highly dexterous prosthetic hands in everyday tasks....read more
KAIST Institutes for Interdisciplinary and Integrative Research
Copyright © 2015 KAIST MATRIX. All rights reserved.
291 Daehak-ro Yuseong-gu Daejeon, 34141, Republic of Korea
Partnered with KAIST Breakthroughs and KAIST Compass
291 Daehak-ro Yuseong-gu Daejeon, 34141, Republic of Korea
Partnered with KAIST Breakthroughs and KAIST Compass