Tag: SLAM
-
Research Highlight
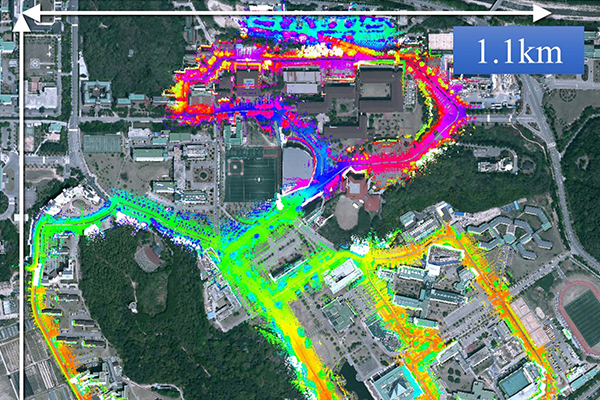
3D high definition urban map for smart city
Through years of collaboration with NAVER LABS, Prof. Ayoung Kim’s team introduced their dataset toward 3D urban mapping for the robotics community. The dataset paper was also accepted and will be presented in May at a major robotics conference, International Conference on Robotics and Automation (ICRA)....read more

-
Research Highlight
Urban Mapping for Autonomous Car with SLAM
Simultaneous Localization and Mapping (SLAM) based accurate 3D maps enhance the vehicle autonomy for autonomous car by fusing sensor information....read more
KAIST Institutes for Interdisciplinary and Integrative Research
Copyright © 2015 KAIST MATRIX. All rights reserved.
291 Daehak-ro Yuseong-gu Daejeon, 34141, Republic of Korea
Partnered with KAIST Breakthroughs and KAIST Compass
291 Daehak-ro Yuseong-gu Daejeon, 34141, Republic of Korea
Partnered with KAIST Breakthroughs and KAIST Compass