



Drilling techniques are used in various fields such as resource exploration and foundation construction. Several kinds of research have been conducted to improve drilling performance in strong strength ground with deep depth. However, in such conditions, equipment becomes heavy and bulky, and the excavated soil is removed using mud and slurry, resulting in environmental problems due to drilling fluid. As existing energy sources such as oil and coal are being depleted, the world is paying attention to exploring new energy sources and further focusing on finding new energy sources on the Moon and Mars. In order to overcome the limitations of existing technologies, the excavation habits and biological structure of natural diggers are simulated for efficient excavation and debris removal. The research team led by Prof. Hyun Myung is developing a novel bio-inspired embedded digging robot called Mole-bot that mimics the mole’s anatomy, structure, and habits.
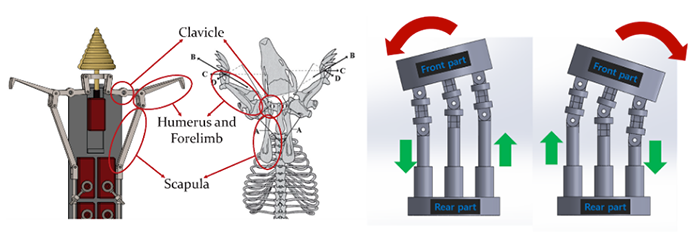
The European mole uses two large forelimbs to excavate. The main elements involved in operating the forelimbs are the clavicle, humerus, and scapula. In particular, the scapula of the mole has an elongated shape, unlike the flat shape of the human scapula. By expanding the surface area through such a shape, a large number of muscles can be connected and, as a result, high digging force can be realized compared to body size. Therefore, a structure of elongated shape, such as that of the scapula of the mole, is designed to exploit several motors. Thus, a link structure that mimics the clavicle and humerus is connected to simulate the movement of the forelimbs of a mole. Finally, the head of the robot is designed with a cone-type drill bit similar to the heads of natural diggers, having a triangular shape.
The mole can freely change digging direction inside a borehole because its waist has a high degree of freedom. The mole-bot developed by the research team can also provide directionality through the robot’s waist movement, which facilitates directional drilling. The developed mole-bot consists of a front body with an excavation mechanism and a rear body that serves as locomotion and locking. The two bodies are connected by four linear actuators and universal joints. Based on the rear body position, the front body can be freely adjusted by controlling the stroke of each linear actuator.
In addition to the robotic platform, the team developed location-aware technology that can be used in the underground environment, which consists of rocks and soils that make it difficult for the robot to use the Global Positioning System (GPS), WiFi, or Radio Frequency (RF) beacons. As the inside of a borehole is narrow and dark, vision and laser sensors are also difficult to use. To overcome this problem, graph-based SLAM is implemented by matching magnetic field data of the Inertial Measurement Unit (IMU) sensor and odometry of a draw wire encoder. Through the developed algorithm, the position of the robot underground can be localized. The excavation speed, maximum direction angle, and localization accuracy of the developed robot are verified by experiments.

The team is currently developing a novel expandable drill bit mechanism that simulates the mole-rat’s teeth and jaw structure for excavating strong ground. The team received the best paper award at the 34th Institute of Control, Robotics and Systems (ICROS) conference, 2019, and the best presentation award at the Int’l Conf. on RiTA (Robot Intelligence Technology and Applications), Malaysia, 2018.
Prof. Hyun Myung School of Electrical Engineering, KAIST
Homepage: http://urobot.kaist.ac.kr
E-mail: hymung@kaist.ac.kr
