



Prof. Sang Ouk Kim’s group at KAIST has developed a new type of artificial muscle fiber based on graphene-liquid crystal elastomer composites. This new artificial muscle has been highlighted as the closest system to human muscle among those reported to the scientific community to date, while also exhibiting a higher power up to 17 times.
It is well-known fact that animal muscles in nature undergo shape deformation by the process of nerve stimulation, resulting in the mechanical movement. Several research fields, including robotics and artificial organs, have developed technologies that aim to replicate this type of movement. However, the majority of these technologies have thus far relied heavily on mechanical devices.
To address this longstanding challenge, the development of artificial muscles that can mimic the flexible movements of natural muscles, exploiting combinations of compliant soft materials, has gained significant attention recently. Unfortunately, a significant limitation for most artificial muscles is their restrictive stroke of deformation, which is still slow and weak compared to that observed in animal muscles. Additionally, to generate strong mechanical motion, an extra energy storage process is required such as twisting or winding before use.
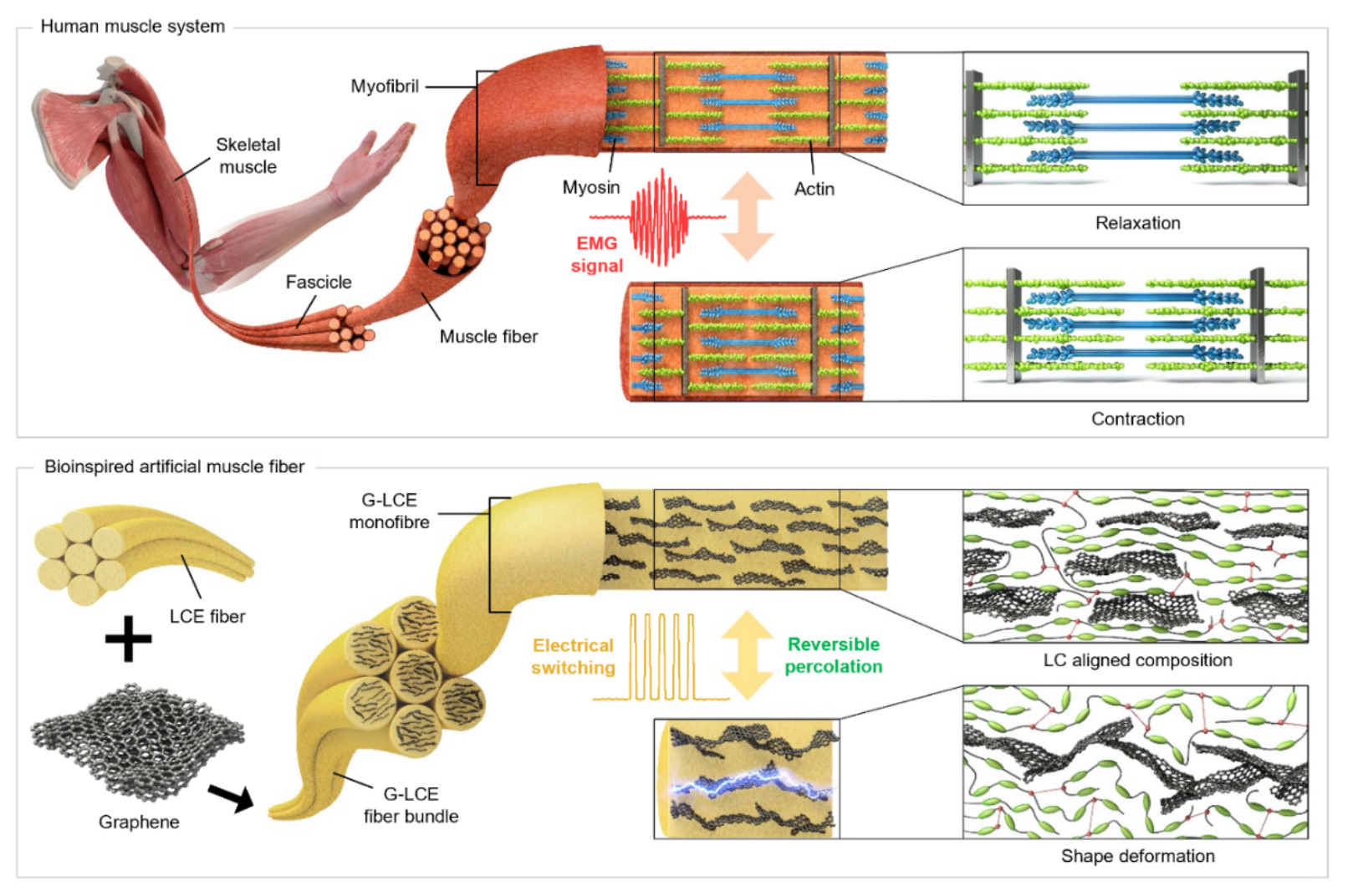
Professor Kim’s research team has created a new material composition that incorporates high-quality graphene fillers into a liquid crystalline elastomer matrix; this allows a large reversible contraction similar to that in animal muscles, along with remote controllability through the use of lasers, while achieving 17 times higher work capacity and 6 times higher power density values than those of natural human muscles. Based on the powerful contraction of a single strand of artificial muscle, the team demonstrated versatile interesting bioinspired actuating structures, including the successful lifting of a 1-kilogram dumbbell and artificial inchworm winning the race with its living counterpart.
“Artificial muscles that were actively developed recently have excellent actuation properties, but none of them has showed the complete range required for practical application so far,” said professor Sang Ouk Kim, the corresponding author of this work and a prominent scholar in the field of material science. “This research is a significant starting point for developing practical artificial muscle materials that can be implemented in the robotics industry, wearable devices, and contribute to advancements in non-face-to-face science and technology in the wake of the 4th industrial revolution,” he also mentioned.
“Our novel artificial muscle fiber also exhibits unprecedented reversible percolation of graphene filler network under stable actuation along the alignment direction, resulting in in-situ monitoring of actuation through electrical switching and effective strengthening of mechanical properties especially in the contracted actuation state,” said Dr. In Ho Kim, the first author and now a postdoctoral fellow in the Department of medical engineering at Caltech. “This intriguing behavior was realized by a judicious optimization for the intimate intermolecular interactions among of the fillers and the matrix, and we have conducted a series of profound characterizations in this study to verify this molecular level interactions in macroscale structures,” he said.
This work was carried out as a joint research project with Professor Jiheong Kang from the Materials Science and Engineering department, Professor Seunghwa Ryu from the Mechanical Engineering department at KAIST, Professor Suk-kyun Ahn from the Polymer Engineering department at Pusan National University, and the support of the National Creative Research Initiative (CRI) Center for Multi-Dimensional Directed Nanoscale Assembly (2015R1A3A2033061) and by the Basic Science Research Program (2019R1C1C1006048) through the National Research Foundation of Korea (NRF).
Prof. Sang Ouk Kim, Dr. In Ho Kim Dept. of Material Science and Engineering, KAIST
E-mail: Sangouk.kim@kaist.ac.kr
Homepage: http://snml.kaist.ac.kr
