



Prof. Kyoungchul Kong’s group at KAIST has developed a soft wearable pneumatic sensor system for real-time estimation of plantar flexion muscle force, which represents a major advance in wearable robotics. This system addresses a key challenge: the direct and accurate measurement of muscle force, which is essential for providing effective assistance to the wearer. Traditional methods rely on indirect estimates such as surface electromyography (sEMG) or motion capture, limiting their usability in dynamic and non-repetitive motions. The newly developed pneumatic mechanomyography (pMMG) sensor system overcomes these limitations by offering a direct, quantitative approach.
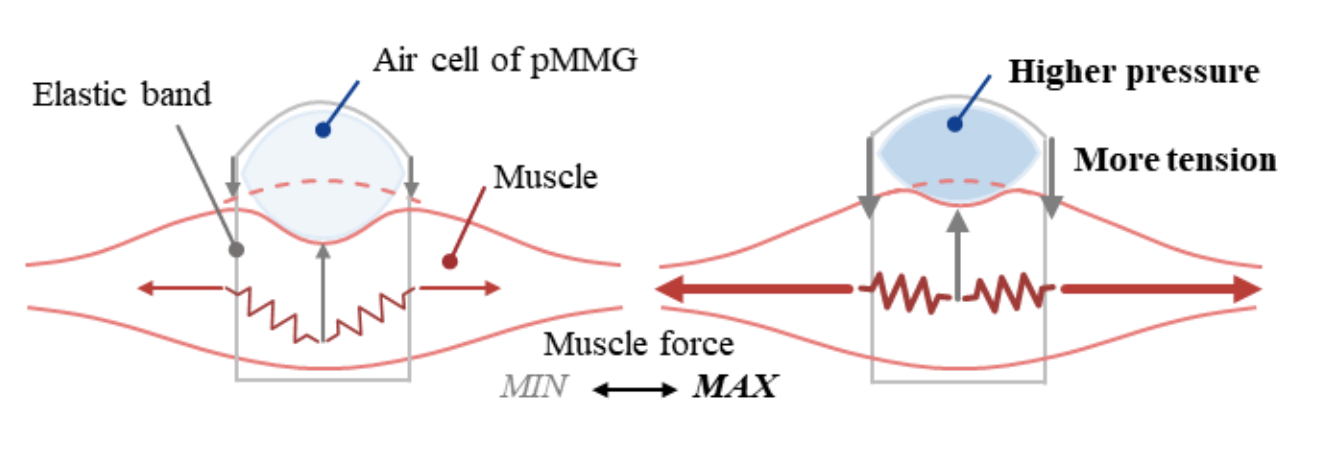
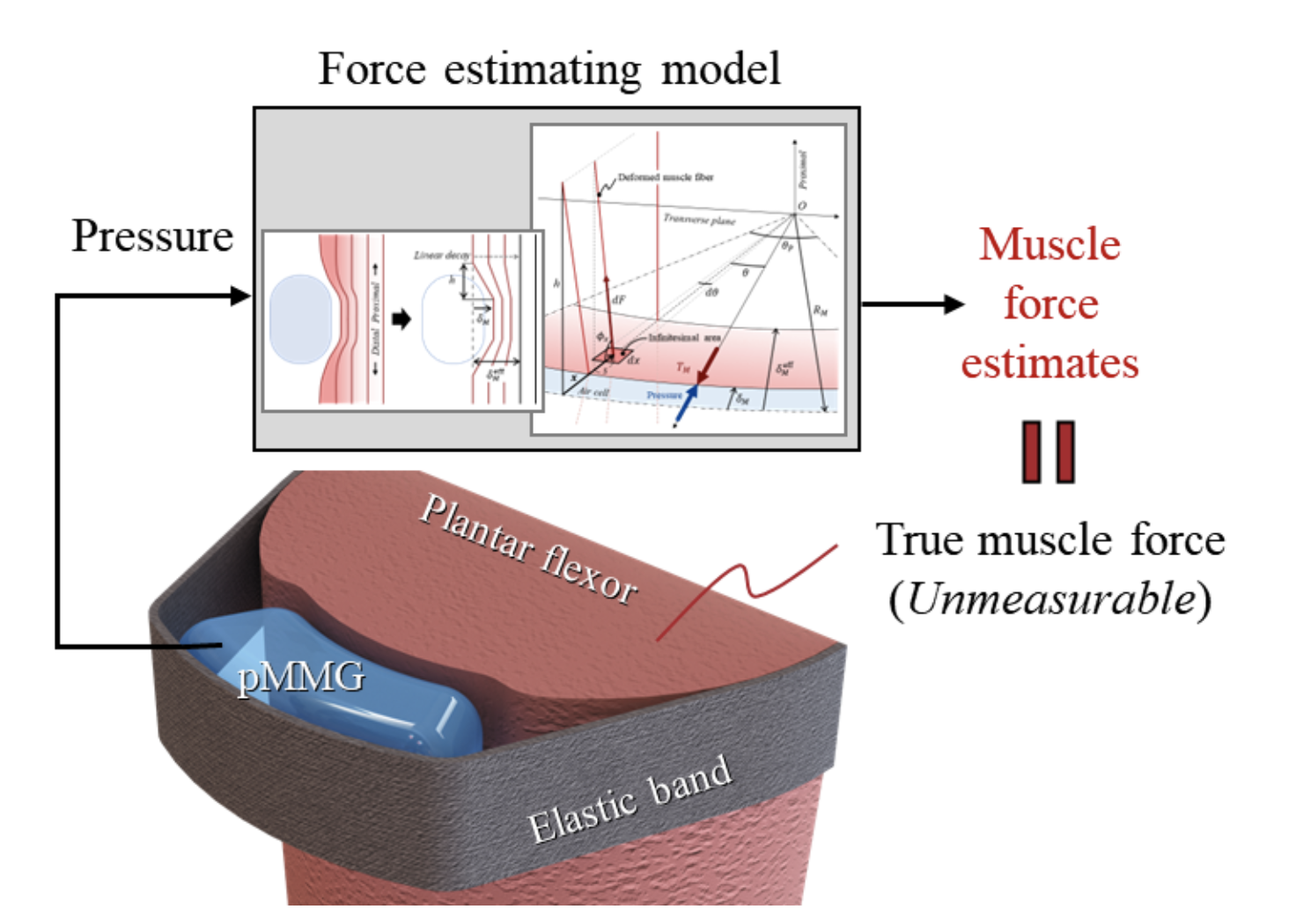
The system features a pressure sensor sealed within a soft air cell, which is placed on the target muscle and wrapped with an elastic band. When the muscle contracts, it presses against the air cell, increasing the internal pressure, which is then measured. The research team developed a two-step model to link the pressure to the muscle’s tension by accounting for geometric and force equilibrium factors. This novel model-based approach ensures a high level of accuracy in muscle force estimation, as demonstrated in human trials. The experiments confirmed that the system could reliably distinguish between active muscle contractions and passive stiffness.
The sensor system’s lightweight, non-invasive design makes it ideal for wearable applications. It provides real-time feedback, enabling wearable robots to adapt to dynamic human movement, which greatly enhances the potential for human–robot interaction in assistive technologies. The compact and easy-to-use nature of this system makes it highly suitable for daily use in a range of environments.
“This technology offers a groundbreaking solution for wearable muscle force measurement. By providing real-time, direct measurement, it has the potential to significantly enhance the adaptability and effectiveness of wearable robots in human–robot interaction,” said Prof. Kyoungchul Kong, the corresponding author and a professor at KAIST. “This development overcomes the limitations of existing estimation methods, creating an invaluable tool for the future of wearable robotics,” said the first author Taeyeon Kim, a graduate student.
The study, titled “Plantar Flexion Muscle Force Estimation with a Soft Wearable Pneumatic Sensor System,” was published in IEEE/ASME Transactions on Mechatronics, vol. 29, no. 4, pp. 2920-2928, August 2024. This research was supported by a grant from the National Research Foundation of Korea (NRF), funded by the Ministry of Science and ICT (MSIT), Republic of Korea.
Prof. Kyoungchul Kong, Mr. Taeyeon Kim Dept. of Mechanical Engineering, KAIST
E-mail: kckong@kaist.ac.kr
Homepage: https://robotics.kaist.ac.kr
