
Advances in computers and artificial intelligence have brought great improvements to unmanned vehicle systems technology. Among the various types of unmanned vehicle systems, unmanned surface vehicles (USVs), also known as unmanned surface vessels, have attracted a great deal of interest for their ability to perform dangerous and/or time-consuming missions in marine environments. In line with this, the inaugural Maritime RobotX Challenge (MRC) was held October 20-26, 2014 in Marina Bay, Singapore. The competition, organized by the AUVSI Foundation and sponsored by the U.S. Office of Naval Research (ONR), was composed of five mission tasks for USVs: 1) navigation and control, 2) underwater search and report, 3) automatic docking, 4) buoy search and observation, and 5) obstacle detection and avoidance. Onboard intelligence is a key factor and all of the mission tasks were required to be performed autonomously with no human intervention.
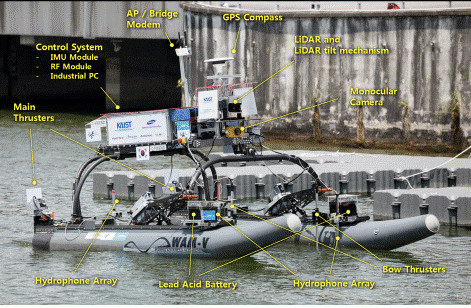
Team “Angry Nerds” led by Prof. Jinwhan Kim in the Department of Mechanical Engineering and the Center of Field Robotics in KIDCS, participated in the competition representing Korea. The team developed a 4m-long USV system, Grey-Duck (Fig. 1), which was built on a 16-foot-long catamaran hull platform (i.e., WAV-V by Marine Advanced Research Inc.). The specifications and configurations of the electronics and propulsion systems were designed and integrated using commercial off-the-shelf (COTS) components. All of the software algorithms for vehicle autonomy including mission management, real-time perception, path planning, and control were developed and tested in simulations and field experiments.
In late 2013, a year before the competition, 15 teams from five different countries (Korea, USA, Japan, Australia, and Singapore) were selected by the local organizing committees in each country. Many of the world’s renowned universities (KAIST, Seoul National University, MIT, University of Tokyo, National University of Singapore, Queensland University of Technology, etc.) were selected, and all of the selected teams developed their own USV systems for the competition over a year-long period. All 15 USVs were sent Marina Bay, Singapore in October 2014 for the on-site competition. After a fierce week-long competition, KAIST advanced to the final round consisting of the six best teams and finally and ultimately took second place.
The Grey-Duck USV system, which the KAIST team developed, is currently being used for unmanned system research in the lab, particularly focusing on coordinated/collaborative operations between multiple non-homogeneous vehicle platforms ranging from underwater to aerial vehicles.