



Prof. David Hyunchul Shim’s research group at KI Robotics is joining the Indy Autonomous Challenge. In this world -premiere event, ten teams from around the world vie for the top prize in a 50- lap race at the prestigious Indiana Motor Speedway, the birthplace of world’s largest motorsports event, the Indy 500.
The self-driving car as we know of it today debuted in 2004 when DARPA hosted the “Grand Challenge”, which was held in the California desert and involved driving 240 kilometers without any human intervention. The participating teams could not go very far in the first year, but soon, by 2005, the researchers were able to meet the challenge to finish the entire course. In 2007, DARPA held another competition in the form of an urban challenge where the participants were required to drive in a regular town following Californian traffic rules. After these events, autonomous driving became a reality and currently we are seeing increasingly more capable autonomous cars from many leading companies such as Telsa and WayMo.
While most of the current autonomous driving research is focusing on the regular street driving, high- speed autonomous driving has not been investigated extensively. Most countries impose speed limits of around 100 km/h on typical highway. High- speed autonomous driving at speeds of more than 100 km/h may seem unnecessary. If we consider the reasoning behind speed limits, they must be a reasonable average for typical drivers. However, if a self-driving car can handle high- speed driving (at more than 150km/h), it will open another possibility for autonomous cars to be a viable alternative to compete with high-speed trains or even UAM (urban aerial mobility) technologies. In Korea, as we have relatively poor aviation infrastructure, a high- speed autonomous car can be an attractive alternative for long-distance travel. To be specific, if we travel from Daejeon to Seoul, the KTX travels very rapidly between railway stations, but the leg from the door to the stations can require quite a long time. The hyped UAM may sound very attractive, but typical UAM vehicles are actually slower than the KTX and will face their own problems, such as noise, and high construction costs for airports (often termed vertiports), Moreover they cannot operate in adverse weather conditions, which is not a problem for high-speed trains or autonomous cars.
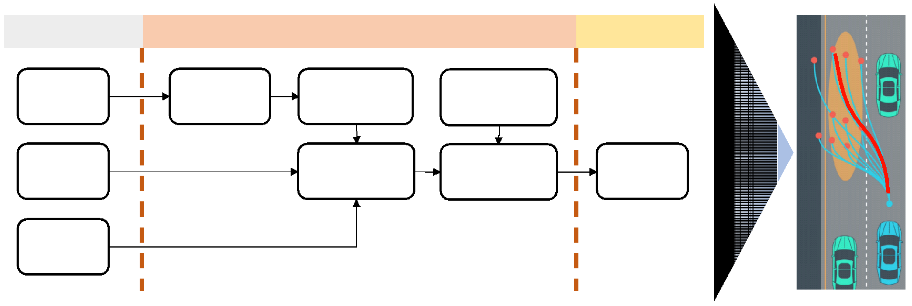
The Indy Autonomous Challenge was founded to encourage researchers to focus their efforts on the development of new type of technologies for high- speed driving with other competing cars. In this competition, a new set of problems, such as precision navigation for high-speed driving, detection and predictions of the path of other car’s, and the need for resilient logic to ensure safe driving operation in the challenging environment should be resolved.
The competing teams must purchase a high-performance racing platform, the Dallara AV-21 platform, which is converted for autonomous driving. The car is equipped with steering and pedal actuators, high performance sensors and computers. The participating teams focus on software development to implement the entire software stack for perception, decision making, navigation, and control.
“This is truly a challenge to push the limit for autonomous driving,” says Prof. Shim. “There are so many uncertainties in this event, so we cannot be sure about the outcomes. However, high-speed autonomous driving technology will play a vital role for the next generation of autonomous cars. I am very proud of my students, who do not hesitate to take on this grand challenge. Their hard work will be valuable.”
Prof. David Hyunchul Shim School of Electrical Engineering, KAIST
Homepage: http://unmanned.kaist.ac.kr
E-mail: hcshim@kaist.ac.kr
