




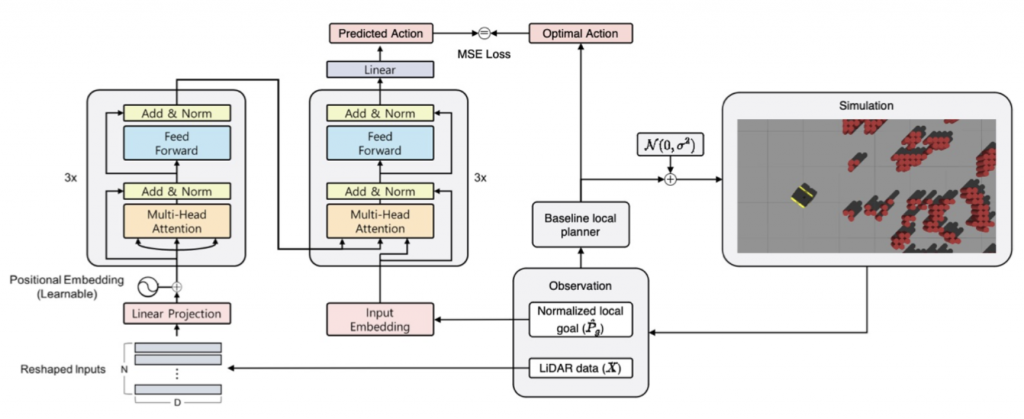
Prof. Han-Lim Choi’s research team at KAIST has introduced an innovative navigation system, Learned-imitation on Cluttered Space (LiCS), designed to address the complex challenge of navigating unmanned ground vehicles (UGVs) in cluttered and narrow indoor environments. Utilizing 2D LiDAR and odometry, the system employs a transformer-based neural network combined with behavior cloning to learn expert navigation strategies. A critical enhancement in this method is the injection of Gaussian noise during training, which strengthens the model’s ability to handle unexpected obstacles and recover from near-collision states, ensuring safe and robust navigation.
LiCS leverages imitation learning, a method that offers distinct advantages over traditional optimization-based algorithms. Learning-based algorithms enable faster real-time computation comparing to optimization-based algorithms, making then well-suited for scenarios requiring rapid navigation responses, especially in tight, cluttered spaces. Furthermore, imitation learning dramatically reduces training times by learning from expert demonstrations, avoiding the resource-intensive trial-and-error cycles typically required in reinforcement learning. This efficiency in both execution time and training positions LiCS as a powerful alternative to navigation methods.
The system was rigorously tested in both simulation and real-world environments, achieving impressive results, including safe navigation at speeds of up to 1.5 m/s. This performance was validated through LiCS’s success at the BARN Challenge during ICRA 2024 in Yokohama, Japan, where the team outperformed 14 competing teams in simulation, achieving the highest score on the all-time leaderboard. They advanced to the final experiment competition, where they clinched the 1st winner title.
LiCS’s balance of speed, safety, and computational efficiency demonstrates its potential for real-world applications, including warehouse automation and search-and-rescue missions, where rapid, reliable navigation is critical.
Prof. Han-Lim Choi Dept. of Aerospace Engineering, KAIST
E-mail: hanlimc@kaist.ac.kr
Homepage: https://lics.kaist.ac.kr
