Tag: Human Robot Interaction
-
Research Highlight
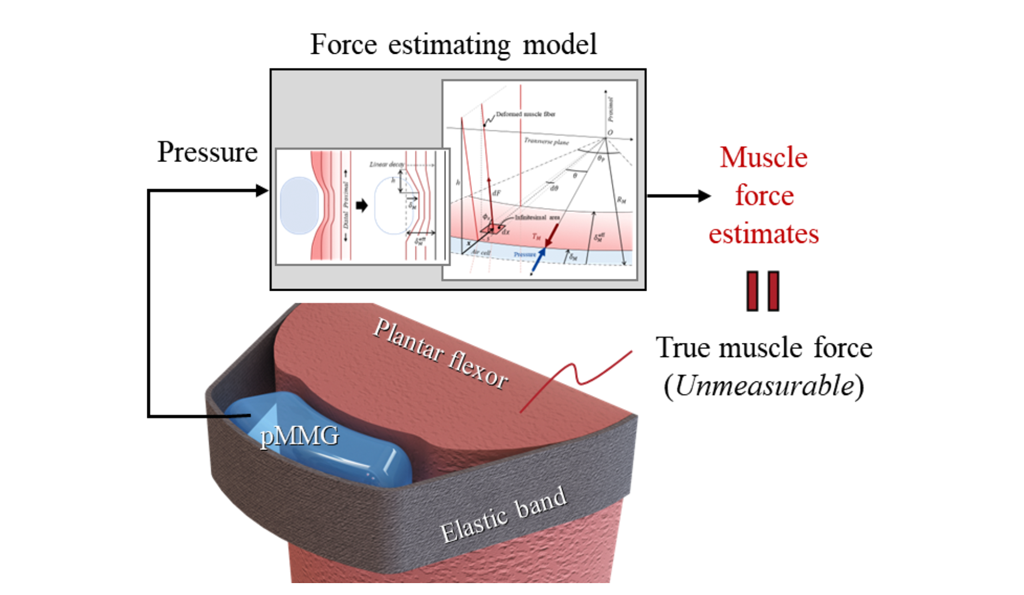
Plantar Flexion Muscle Force Estimation with a Soft Wearable Pneumatic Sensor System
Prof. Kong’s group developed a wearable pressure sensor for real-time estimation of plantar flexion muscle force by modeling intramuscular pressure....read more
-
Research Highlight
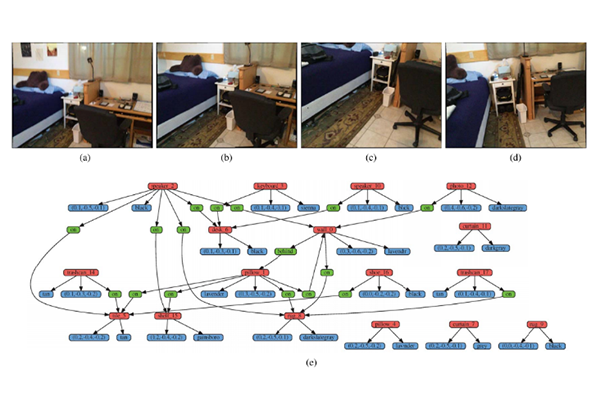
3-D Scene Graph: A Sparse and Semantic Representation of Physical Environments for Intelligent Agents
Professor Jong-Hwan Kim’s research team defined a 3-D scene graph, which represents physical environments in a sparse and semantic way....read more
-
Research Highlight
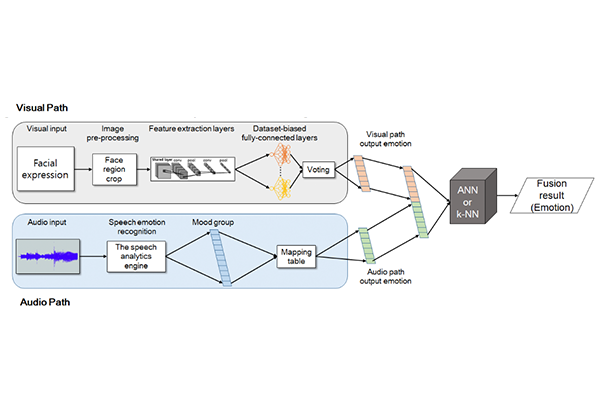
Decision-Level Fusion Method for Emotion Recognition using Multimodal Emotion Recognition Information
We confirmed which combination of features of multi-modal emotion recognition achieves the highest accuracy....read more
KAIST Institutes for Interdisciplinary and Integrative Research
Copyright © 2015 KAIST MATRIX. All rights reserved.
291 Daehak-ro Yuseong-gu Daejeon, 34141, Republic of Korea
Partnered with KAIST Breakthroughs and KAIST Compass
291 Daehak-ro Yuseong-gu Daejeon, 34141, Republic of Korea
Partnered with KAIST Breakthroughs and KAIST Compass