-
Research Highlight
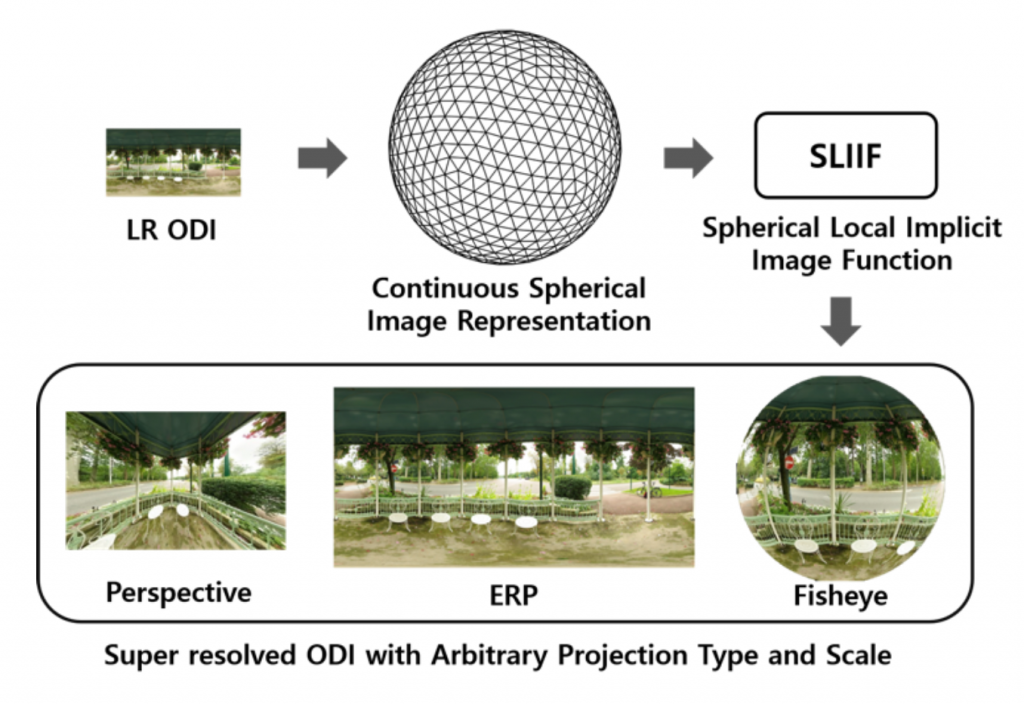
SphereSR: 360º Image Super-Resolution with Arbitrary Projection via Continuous Spherical Image Representation
A new algorithm has been developed to generate omnidirectional images to super-resolve a low-resolution 360° image into a high-resolution image with arbitrary projection type via continuous spherical image representation....read more
-
Research Highlight
Radar-based Navigation for All-weather Autonomous Driving
Radar is a widely adopted sensor for automotive and military purposes; however, few studies have focused on using radar as the dominant navigational sensor. Unlike Light Detection and Ranging (LiDAR) and cameras, radar is less sensitive to light condition and even robust under heavy rain or dust....read more

-
Research Highlight
Automatic Multi-Target Detection and Tracking for Unmanned Surface Vehicles
An algorithm for detecting and tracking multiple targets in marine environments was developed by a team of student researchers at KI-R. The algorithm was applied to an 8-m long unmanned surface vehicle and its performance was demonstrated in field tests in a real-sea environment....read more

291 Daehak-ro Yuseong-gu Daejeon, 34141, Republic of Korea
Partnered with KAIST Breakthroughs and KAIST Compass