-
Research Highlight
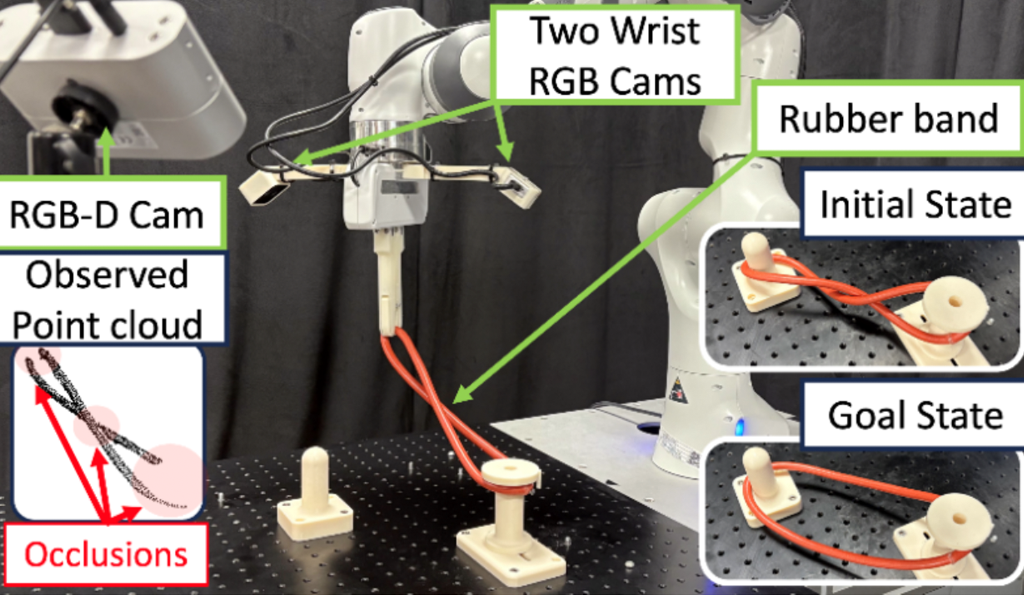
Advancements in Elastic Deformable-Object Manipulation
Prof. Daehyung Park’s research group developed implicit neural-representation learning for deformable object manipulation in real-world....read more
-
Research Highlight
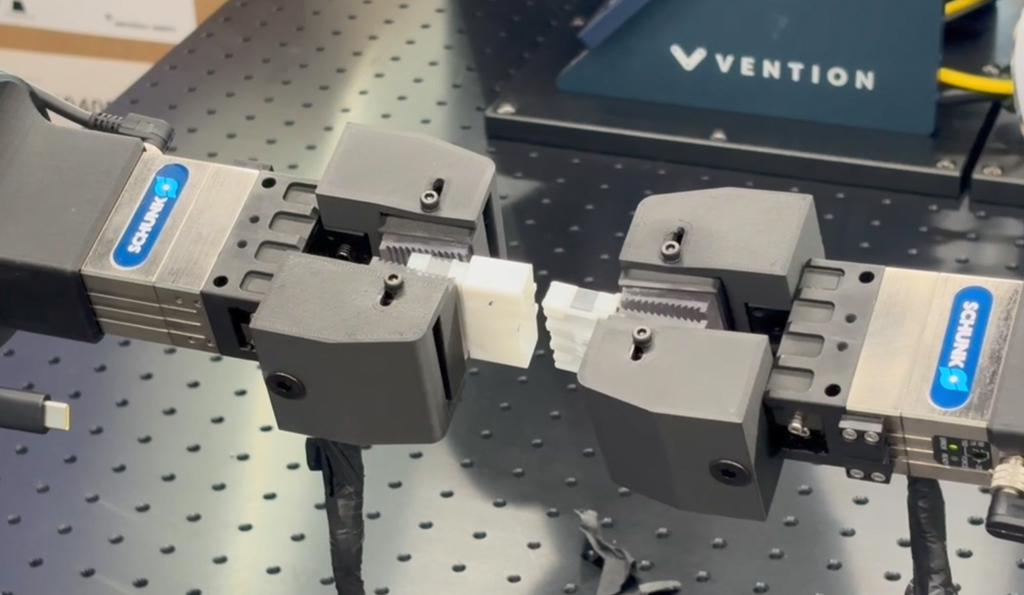
Dual-Arm Teleoperation for Automating Unstructured Bimanual Tasks in Manufacturing
Professor Ryu’s group has developed a dual-arm teleoperation system to automate complex, contact-rich bimanual tasks through remote and virtual human demonstrations....read more
-
Research Highlight Top Story
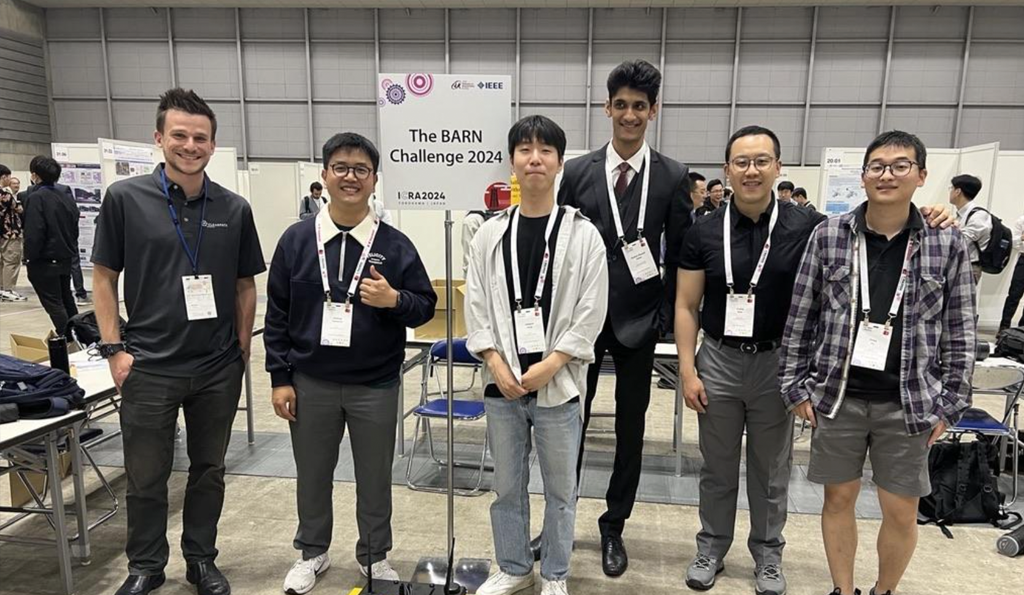
Learned-Imitation for Navigation in Cluttered Space
Prof. Han-Lim Choi’s research team was the 1st winner at the BARN Challenge at ICRA 2024 (Yokohama, Japan) with an imitation-learning based algorithm....read more
-
Research Highlight
Constrained Disturbance Observer
In robotics, achieving accurate motion tracking is a basic and fundamental challenge. For accurate tracking, robust control methods such as the Disturbance Observer (DOB) have been studied to eliminate uncertainties such as external forces and joint friction. However, the need for safe interactions has grown as robots increasingly share workspaces with humans. This creates a paradox: robots must not only track accurately but also respond safely to external forces that occur by human interactions. To address this, Prof. Min Jun Kim’s group at KAIST developed the Constrained Disturbance Observer (CDOB) framework, which adds intelligence to the ordinary DOB through optimization techniques. Consequently, while maintaining accuracy during free motion, robots are also capable of managing safety constraints and interacting with unknown environments....read more

-
Research Highlight
Two-Year Journey of Team KAIST to the Finals of MBZIRC 2023
Team KAIST, comprising students from the labs MORIN (of Prof. Jinwhan Kim) and USRG (of Prof. Hyunchul Shim), in partnership with PABLO AIR, won the 2nd Place Winner position in the MBZIRC Maritime Grand Challenge, one of the world’s largest robotics competition....read more

-
Research Highlight
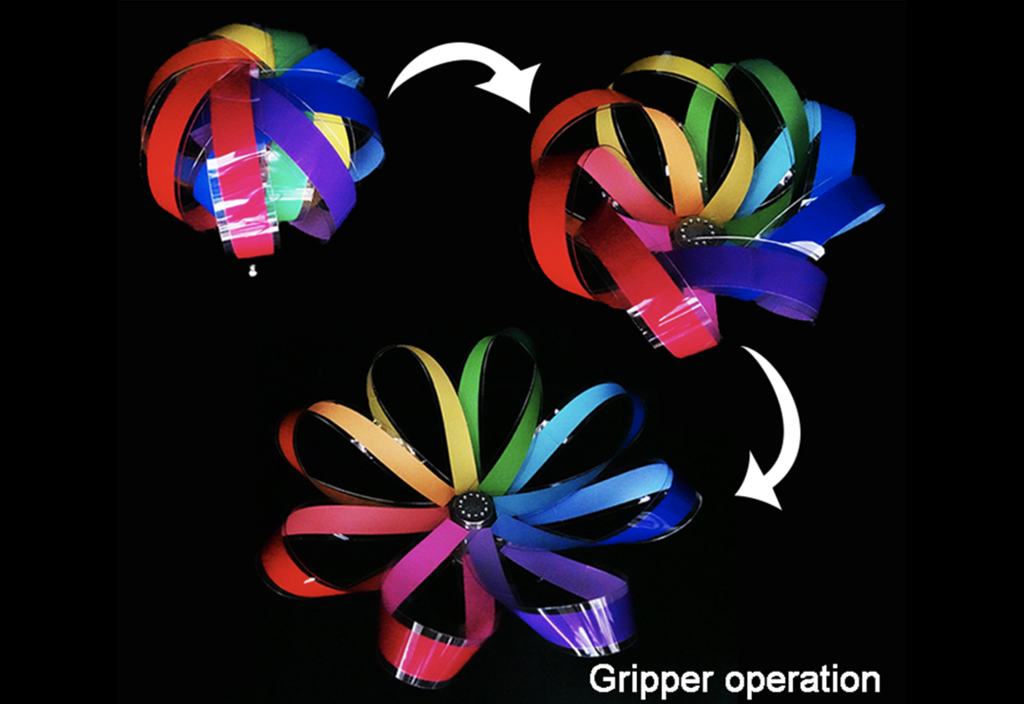
Ultra-strong soft gripper that lifts 100kg with 130g
Prof. Lee’s group, in collaboration with KIST, innovated a lightweight, cost-effective soft robotic gripper capable of securely holding 100kg objects, promising enhanced utility in various domestic and industrial applications....read more
-
Research Highlight
2.5D Laser-Cutting-Based Customized Fabrication of Long-Term Wearable Textile sEMG Sensor
Prof. Jung Kim’s group has developed a 2.5D laser cutting method to accelerate customized sEMG sensor fabrication from design to production. sEMG sensors measure human muscle activity and are widely used in wearable systems for human-machine interaction. In order to use sEMG sensors for a long time in daily life, it is necessary to develop a sensor that can be customized and worn easily and does not affect the signal due to movement. This customizable textile-based sEMG sensor provides high wearing comfort and improves the sensor signal quality through stable contact....read more

-
Introduction to KI
KI for Robotics
The Urban Robotics Lab (URL) focuses on research and development of robotics technologies for smart cities....read more

-
Research Highlight
Deep Generative Diffusion Models
AAILab, KAIST has developed various deep generative model structures and inference methods to synthesize realistic images through diffusion processes. ...read more

-
Research Highlight
Self-Supervised Learning to Distill Hierarchy in High-Dimensional Dynamic Systems
Prof. Han-Lim Choi’s research team has developed a learning framework to control a high-dimensional robotic system that distills underlying hierarchical structure in robot motion data. By learning high-level intentions as well as low-level control actions, the proposed framework enables adaptation of policy learned from a certain task to much more diverse sets of tasks. ...read more
291 Daehak-ro Yuseong-gu Daejeon, 34141, Republic of Korea
Partnered with KAIST Breakthroughs and KAIST Compass