



Soft robotic grippers, employing materials such as silicone, fabric, and paper, serve as a robotic hand to safely grasp and release objects. Unlike their rigid counterparts, these soft grippers are ideal for domestic robots tasked with handling delicate items such as eggs or logistic robots carrying a variety of objects. However, a common challenge has been their low load capacity, which often leads to loss of grip, especially when slight external forces are applied.
Prof. Dae-Young Lee’s group from the Department of Aerospace Engineering at KAIST, in collaboration with Dr. Kahye Song’s research group from the Intelligent Robotics Research Center at KIST, have addressed this challenge head-on. They developed a soft gripper with a unique woven structure capable of holding objects weighing over 100 kg, while only being composed of 130 grams of material. The results of the study were published on August 2 in the international journal Nature Communications (14: 4633, 2023) and were selected as Editors’ Highlights, which introduces the best 50 papers in each field.
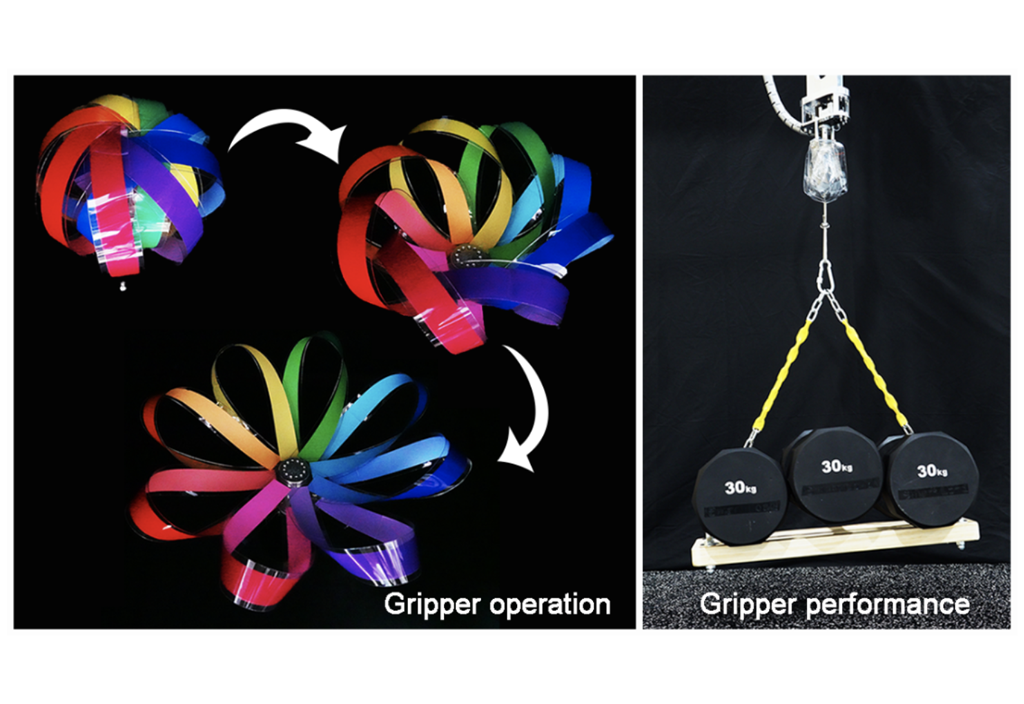
Diverging from the conventional approach of exploring new materials or reinforcing existing structures, the researchers drew inspiration from textile engineering. They employed a weaving technique that intertwines individual threads to create a robust fabric. This age-old technique has been used in crafting durable materials for clothing, bags, and industrial textiles. Utilizing slender strips of PET plastic, the design allowed for the creation of a woven structure through a process of intertwining and unwinding.
This innovative gripper, weighing just 130 grams, can securely hold an object weighing 100 kilograms, which is a significant leap compared to conventional grippers of similar weight. In contrast, traditional grippers that can lift the same weight are considerably heavier, weighing in at 100 kilograms. This innovation marks a significant stride in improving the load capacity relative to its own weight.
Moreover, the soft robotic gripper is cost-effective due to its plastic construction, which costs just a few thousand won per unit. This, coupled with its ability to handle objects of diverse shapes and weights, makes it a competitively priced gripping solution. The manufacturing process is straightforward; by simply fastening a plastic strip, the production can be completed in under 10 minutes, which also ensures easy replaceability and maintenance, enhancing process efficiency. The adaptability of this gripper makes it suitable for diverse environments requiring robust gripping performance or the ability to endure harsh conditions. With its versatility in size and ability to handle objects of varied shapes and weights, from thin cards to delicate flowers, this soft gripper is anticipated to find use in industries, logistics, and household chores requiring a gentle yet firm grip.
This work was supported by the National Research Foundation of Korea(NRF) grant funded by the Korean government (MSIT) (No. 2022R1C1C1003718, NRF-2020H1D3A2A03099291) and the KIST major project. The paper is authored by Gyeongji Kang (KIST), Dr. Young-Joo Kim (IBS), Sung-Jin (KAIST), and Prof. Se Kwon Kim (KAIST).
Prof. Dae-Young Lee Dept. of Aerospace Engineering, KAIST
E-mail: ae_dylee@kaist.ac.kr
Homepage: http://arml.kaist.ac.kr
