-
Research Highlight
Artificial Intelligence to discover hidden enzymes
A joint research team composed of members from KAIST and UCSD developed an artificial intelligence that predicts enzyme functions from protein sequences....read more
-
Research Highlight
Deep Generative Diffusion Models
AAILab, KAIST has developed various deep generative model structures and inference methods to synthesize realistic images through diffusion processes. ...read more

-
Research Highlight
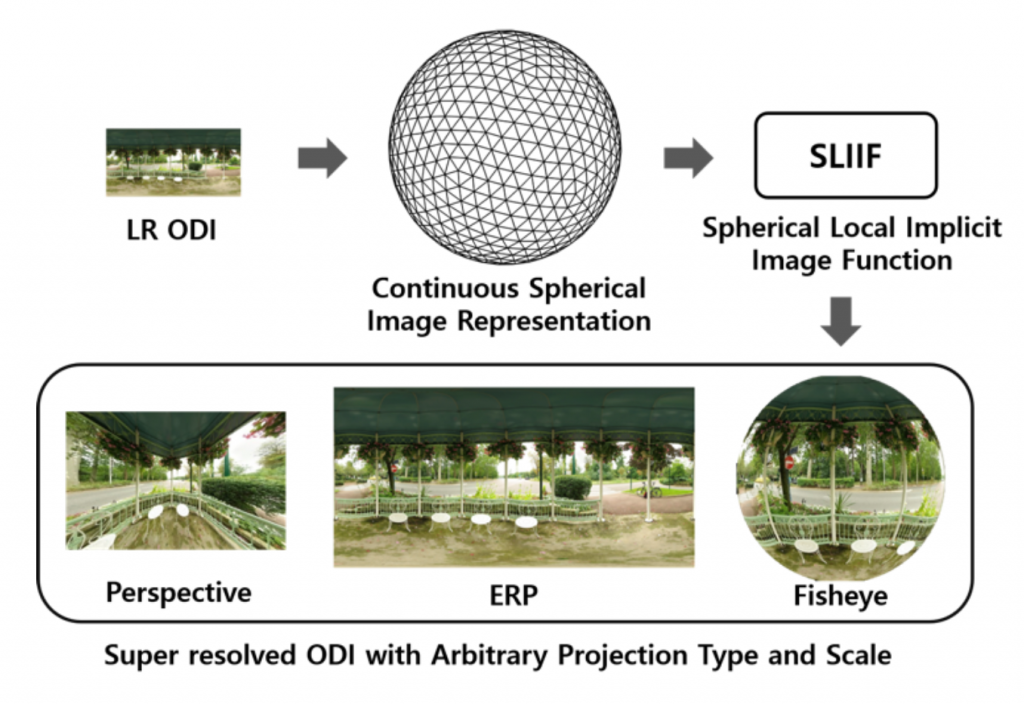
SphereSR: 360º Image Super-Resolution with Arbitrary Projection via Continuous Spherical Image Representation
A new algorithm has been developed to generate omnidirectional images to super-resolve a low-resolution 360° image into a high-resolution image with arbitrary projection type via continuous spherical image representation....read more
-
Research Highlight
Reinforcement Learning Algorithm for Batch Chemical Process Control
Haeun Yoo, a member of Prof. Jay H. Lee’s group, has proposed a phase segmentation approach and modified deep deterministic policy gradient algorithm for batch process optimal control under uncertainty....read more

-
Research Highlight
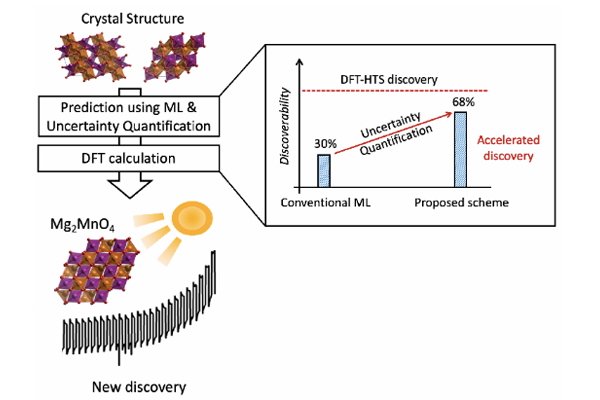
Accelerated Material Design Framework using Uncertainty-Quantified Hybrid Machine Learning/Density Functional Theory Approach
Prof. Yousung Jung’s group has developed a new accelerated high throughput screening (HTS) method using uncertainty-quantified machine learning (ML) and density functional theory (DFT) that was applied to explore the Mg-Mn-O chemical space for photoanode application. Notably, the proposed HTS scheme required only 1.5% of the target chemical space for further DFT calculations, accelerating the entire process by > 50 times for the same discovery compared to the brute-force DFT-HTS done previously. This means an improvement of the screening performance (discoverability) by more than a factor of 2 compared to the conventional ML-based HTS approach....read more
-
Research Highlight
Imaging with Events: High-resolution High-quality HDR Imaging using Event Cameras
New algorithms have been developed to generate non-blurry, high-resolution, high-quality, and high-dynamic range intensity images using sparse event streams from an event camera, which is a new imaging sensor able to capture visual information with low latency even under extremely low illumination....read more

-
Research Highlight
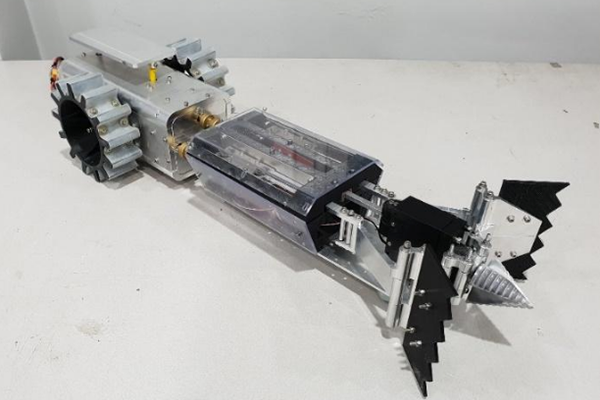
Mole-bot: Development of bio-inspired embedded directional drilling robot
A research team led by Prof. Hyun Myung developed a bio-inspired digging robot called Mole-bot that simulates the mole's biological structure and behavior for resource exploration on Earth and other planets. In addition, a localization algorithm that can estimate the robot position and orientation in the underground environment was developed. The developed platform was verified through experiments on a testbed filled with soil....read more
291 Daehak-ro Yuseong-gu Daejeon, 34141, Republic of Korea
Partnered with KAIST Breakthroughs and KAIST Compass