



Surface electromyography (sEMG) sensors are used to measure muscle activity and are widely used as human-machine interfaces. Initially, they were used only in medical and research settings for muscle diagnosis and evaluation, but their use is expanding to more general fields such as health monitoring and wearable robotics. Prof. Jung Kim’s research group at KAIST has proposed an sEMG sensor system obtained via a fast and precise customizable fabrication method of a fabric sEMG sensor along with a motion intention algorithm. The researchers introduce a 2.5D laser-cutting-based fabrication method on a densely weaved conductive fabric. The 2.5D laser cutting is a method of varying the cutting depth according to the position of the laser head. The proposed fabrication method creates a garment pattern that conforms to the body according to the wearer, and enables precise placement of electrodes and wires in the exact intended location on the created garment pattern in a single integrated process, allowing rapid, precise, and reliable production of the personalized sensor. The study was published on July 13, 2022 in IEEE Robotics and Automation Letters (RA-L). This paper won a RA-L Best Paper Award, selected by the Editorial Board as one of five winners from among more than 1100 papers published in RA-L in 2022. (2.5D Laser-Cutting-Based Customized Fabrication of Long-Term Wearable Textile sEMG Sensor: From Design to Intention Recognition)
“For service robots, making wearable sensors to fit the shape of the attachment part of the user is the last step and challenge for industrialization,” said Prof. Jung Kim, the corresponding author and a professor in the Department of Mechanical Engineering at KAIST.
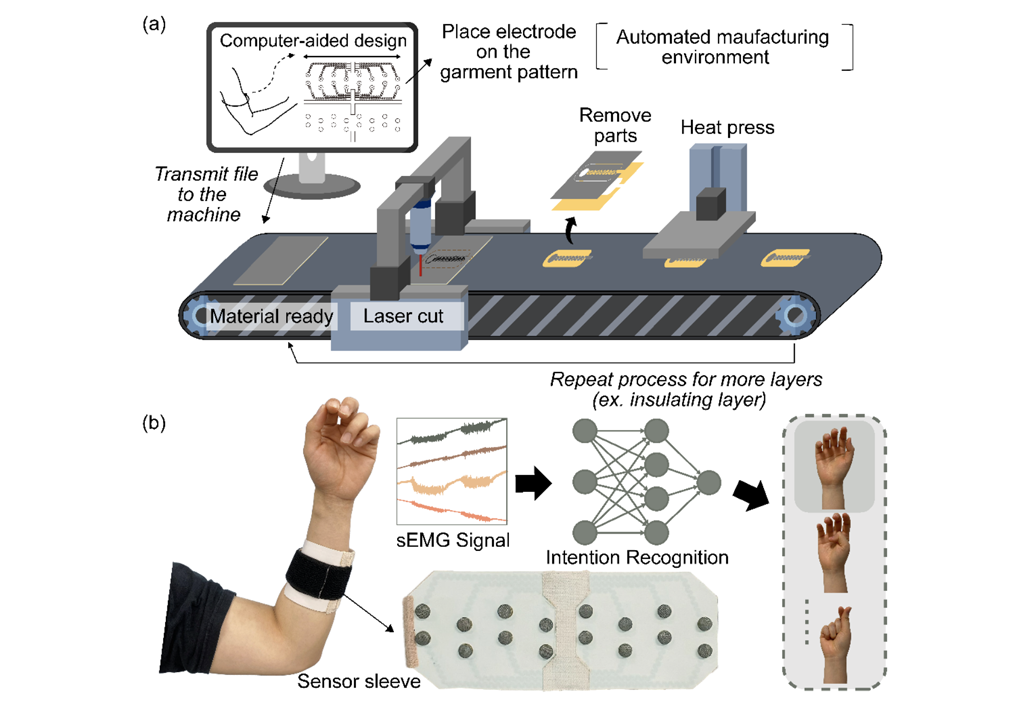
Existing commercial sEMG sensors are made of hard materials and are not only uncomfortable to wear, but are also prone to sweating. If a layer of conductive sweat forms between the skin and the electrodes, an electrical short circuit may occur and the possibility of the sensor physically slipping increases, greatly affecting the quality of the resulting signal. It is also difficult for general users to identify the exact location where signal collection is needed and place the electrodes. To solve this problem, this research team presented a method to efficiently design and manufacture a textile-based large-area sensor that absorbs sweat while minimizing discomfort to the wearer and was customized to the wearer, and planned from sensor design to actual use. In the introduced 2.5D laser cutting manufacturing method that can directly implement computer-designed patterns through laser cutting, the intensity of the laser is adjusted to vary the depth at which the laser cuts, making it possible to form the desired pattern.
“Our work provides a complete solution from sensor design to intent recognition, giving sEMG sensors the potential to be used in a variety of fields,” said the first author Hwayeong Jeong, a graduate student at KAIST and now a postdoctoral researcher in the Reconfigurable Robotics Lab at The École polytechnique fédérale de Lausanne (EPFL). A CNN-based motion intention algorithm was implemented and high motion classification accuracy was achieved regardless of the presence of sweat.
The researchers expected that this technology would be useful in applications that require understanding of people’s intentions in everyday life by enabling the production of precisely customized wearable sensors regardless of the size and number of electrodes. For example, such sensors should be worn for long periods of time when used for prosthetic hands and feet. While minimizing the burden caused by the sensors to the wearer, more natural movement of the prosthetic hand and leg can be achieved through the use of muscle signal sensors that are most directly related to human movement. “I hope this work can be the stepping stone for wearable sensors contributing to greater achievement of research and development,” said Prof. Kim.
This research was supported by the Convergent Technology R&D Program for Human Augmentation through the National Research Foundation of Korea (NRF) funded by the Ministry of Science and ICT (NRF-2020M3C1B8A01111567).
Prof. Jung Kim, Dr. Hwayeong Jeong, Jirou Feng Dept. of Mechanical Engineering, KAIST
E-mail: jungkim@kaist.ac.kr
Homepage: http://biorobotics.kaist.ac.kr
